
1.-INTRODUCCION: En este blog veremos cómo realizar pruebas
de giro de motores DC con Arduino y un puente “H” L293B/D, muchas veces cuando
hacemos nuestros circuitos de robótica no funcionan, puede ser una falla de una
mala conexión, algún componente averiado, con esta prueba descartamos que el driver
L293B o el L293D está operativo o si es que tiene alguna falla, lo vamos
a programar que el carrito vaya adelante, reversa, izquierda y derecha, tengo
el diagrama, materiales, código y la explicación paso a paso de como realizar
el circuito, también les dejare un video para que lo puedan ver el ensamble del circuito.
Aquí les dejo
unos ejemplos de lo que podemos hacer con un puente H.


También les
dejo estos videos con puente “H”.
1.-Carrito a control remoto con Arduino /
Bluetooth / Android.
2.-Carrito evasor de obstáculos con
Arduino, sensor ultrasónico y servomotor.
3.-Como hacer un carrito a control remoto
RF 433Mhz | En protoboard paso a paso.
2.-MATERIALES: Aquí
les dejo la lista de materiales utilizados para este circuito.
· 1 L293B o el L293D.
· 1 regulador de voltaje LM7805.
· 2 pilas de litio 18650, o una pila de 9v.
· 1 porta pilas para las pilas de litio.
· Cables o jumpers para las conexiones.
· 1 chasis para las pruebas, en el chasis viene 2 llantas, 2 motores y la rueda loca.
3.-DIAGRAMA: A continuación,
les dejo el diagrama, cómo vemos es un diagrama muy simple, aquí les explicare
paso a paso de cómo hacer las conexiones.

4.- ¿QUE ES ARDUINO?
Arduino es una plataforma de
creación de electrónica de código abierto, la cual está basada en hardware y
software libre, flexible y fácil de utilizar para los creadores y desarrolladores.
Esta plataforma permite crear diferentes tipos de microordenadores de una sola
placa a los que la comunidad de creadores puede darles diferentes tipos de uso.
Para poder entender este
concepto, primero vas a tener que entender los conceptos de hardware libre y el
software libre. El hardware libre son los dispositivos cuyas
especificaciones y diagramas son de acceso público, de manera que cualquiera
puede replicarlos. Esto quiere decir que Arduino ofrece las bases para que
cualquier otra persona o empresa pueda crear sus propias placas, pudiendo ser
diferentes entre ellas, pero igualmente funcionales al partir de la misma base.
El software libre son
los programas informáticos cuyo código es accesible por
cualquiera para que quien quiera pueda utilizarlo y modificarlo. Arduino
ofrece la plataforma Arduino IDE (Entorno de Desarrollo Integrado), que es un
entorno de programación con el que cualquiera puede crear aplicaciones para las
placas Arduino, de manera que se les puede dar todo tipo de utilidades.
El proyecto nació en 2003,
cuando varios estudiantes del Instituto de Diseño Interactivo de Ivrea, Italia,
con el fin de facilitar el acceso y uso de la electrónica y programación. Lo
hicieron para que los estudiantes de electrónica tuviesen una alternativa más
económica a las populares BASIC
Stamp, unas
placas que por aquel entonces valían más de cien dólares, y que no todos lo
podían comprar.
El resultado fue Arduino, una
placa con todos los elementos necesarios para conectar periféricos a las entradas
y salidas de un microcontrolador, y que puede ser programada tanto en
Windows como macOS y GNU/Linux. Un proyecto que promueve la filosofía 'learning
by doing', que viene a querer decir que la mejor manera de aprender es
cacharreando.
5.-ARDUINO UNO: La
placa Arduino
UNO es la mejor placa para iniciar con la programación y
la electrónica. Si es tu primera experiencia con la plataforma Arduino, la
Arduino UNO es la opción más robusta, más usada y con mayor cantidad de
documentación de toda la familia Arduino.
Arduino
UNO es una placa basada en el microcontrolador ATmega328P.
Tiene 14 pines de entrada/salida digital (de los cuales 6 pueden ser usando con
PWM), 6 entradas analógicas, un cristal de 16Mhz, conexión USB, conector jack
de alimentación, terminales para conexión ICSP y un botón de reseteo. Tiene
toda la electrónica necesaria para que el microcontrolador opere, simplemente
hay que conectarlo a la energía por el puerto
USB ó
con una pila de 9 o 12v por el conector Jack.

6.- PUENTE “H”, L293B / L293D.
El
Driver puente H para motores L293D/B es un
circuito que tiene en su interior 4 drivers o medio puente “H”. La
corriente máxima que el L293D puede manejar es de 600 mA, y el L293B maneja una
corriente de 1Amp por canal, con voltajes desde 4.5 volts a 36 voltios DC. Cada
canal es controlado por señales TTL (lógica transistor a transistor). Cada
pareja de canales también dispone de señales para habilitar la conexión o
desconexión de los mismos.
Todas
las entradas del circuito Integrado L293B/D son compatibles con TTL,
por lo que pueden manejarse con la mayoría de los micro controladores y
circuitos lógicos del mercado. La salida de los drivers puede activarse y
desactivarse en pares, mediante señales de habilitación. Cuando se presenta un
1 lógico en los pines de habilitación, las señales correspondientes de salida estarán
activas y en fase con la señal de entrada. Cuando las entradas de habilitación
presentan un estado lógico 0, las salidas se encuentran en estado de alta
impedancia.
¿Para qué sirve un
Puente "H"?
Gracias a que este
circuito integrado es capaz de producir corrientes bidireccionales, es útil en
aplicaciones que requieran controlar la dirección de giro y velocidad de
motores de DC. Otras de sus aplicaciones son el control de relevadores, motores
de paso bipolares, solenoides y cualquier otro dispositivo electrónico de
corriente continua que cumpla con las especificaciones eléctricas del
dispositivo.
Información técnica.
- Voltaje de entrada (motores): 4.5V - 36V.
- Corriente DC por canal L293D: 600mA.
- Corriente DC por canal L293B: 1Amp.
- Corriente pico por canal: 1.2 Amp.
- Protección contra sobre carga térmica.
- Diodos de protección contra voltajes inversos
generados por las cargas inductivas (motores).
- En el caso de motores es posible controlar
tanto su velocidad (PWM) como su dirección de giro.
- Control de motores pasó a paso en modo unipolar o bipolar.
Después de haber leído la teoría de
este circuito, les invito que busquen más información en la web, hay bastante
por leer en Google, ahora vamos cargar el código al Arduino uno, más
abajo en los links de descargas allí pueden obtener su código Arduino, entonces
procedemos a cargar el código, tener en cuenta el puerto COM donde esta conectado
nuestro Arduino, y también seleccionar el Arduino que estamos utilizando.

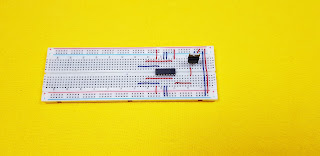
Luego de cargar el código al Arduino,
ahora empezamos a ensamblar el circuito, hacemos las conexiones del L293B/D
en la protoboard, recuerden guiarse del diagrama, a continuación, les dejo unas
fotos de como realice mis conexiones en la protoboard.

Luego de debemos de ensamblar en el chasis la protoboard y el Arduino, realizar las conexiones de los motores, el Arduino con la protoboard, alimentación de todo el circuito, en mi caso lo alimente con 2 pilas de litio 18650, ya que estas tienen mas corriente para manejar los motores DC.

En el siguiente video explicó paso a paso
de cómo realizar sus conexiones y de como cargar el código, también pueden
modificar el código, revisen el video, nos vemos en un próximo video, suscríbete,
dale like al video y comparte este blog.
Video.
Links de descarga:
1.-Codigo Arduino.
https://mega.nz/folder/zMxyzZYD#YExQRALcKnXW7K_VxpJlBg
2.-Diagtrama.
https://mega.nz/file/yR50HLwT#nROzzngV9bhH_aPy5IYd-9LictqfxqF2oYV15Ev1s-I
Comentarios